Primary-Backup Replication COS 418: Distributed Systems Lecture

37 Slides6.20 MB
Primary-Backup Replication COS 418: Distributed Systems Lecture 5 Kyle Jamieson
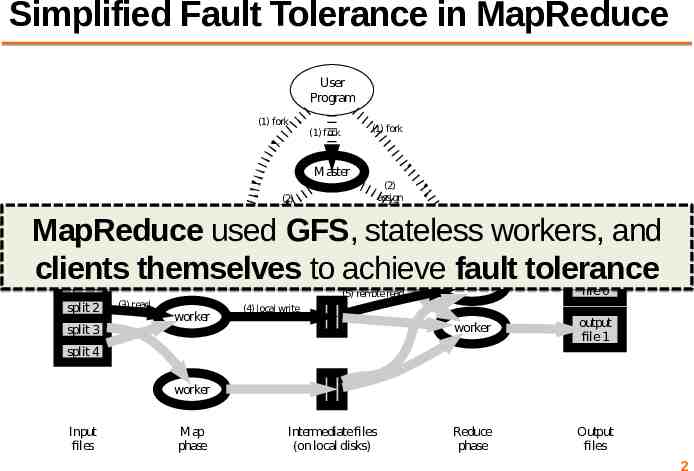
Simplified Fault Tolerance in MapReduce User Program (1) fork (1) fork (1) fork Master (2) assign map (2) assign reduce MapReduce used GFS, stateless workers, and clients themselves to achieve fault tolerance worker split 0 (6) write split 1 split 2 split 3 (3) read (5) remote read worker worker output file 0 worker output file 1 Reduce phase Output files (4) local write split 4 worker Input files Map phase Intermediate files (on local disks) 2
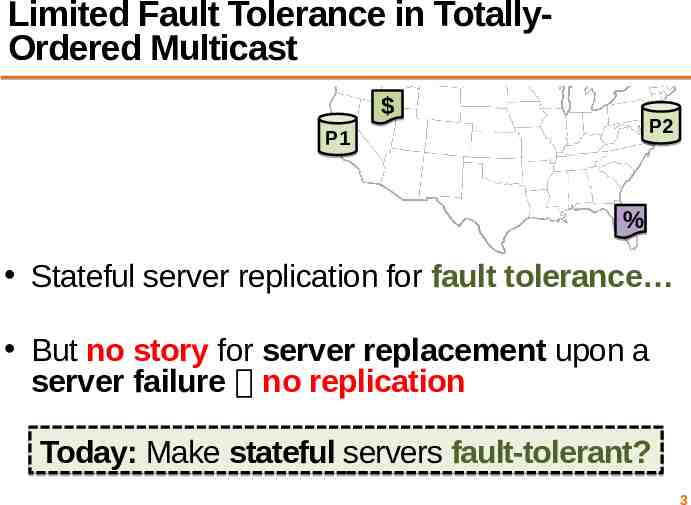
Limited Fault Tolerance in TotallyOrdered Multicast P2 P1 % Stateful server replication for fault tolerance But no story for server replacement upon a server failure no replication Today: Make stateful servers fault-tolerant? 3
Plan 1. Introduction to Primary-Backup replication 2. Case study: VMWare’s fault-tolerant virtual machine Upcoming – Two-phase commit and Distributed Consensus protocols 4
Primary-Backup: Goals Mechanism: Replicate and separate servers Goal #1: Provide a highly reliable service – Despite some server and network failures Continue operation after failure Goal #2: Servers should behave just like a single, more reliable server 5
State machine replication Any server is essentially a state machine – Set of (key, value) pairs is state – Operations transition between states Need an op to be executed on all replicas, or none at all – i.e., we need distributed all-or-nothing atomicity – If op is deterministic, replicas will end in same state Key assumption: Operations are deterministic – We will relax this assumption later today 6
Primary-Backup (P-B) approach Nominate one server the primary, call the other the backup – Clients send all operations (get, put) to current primary – The primary orders clients’ operations Should be only one primary at a time Need to keep clients, primary, and backup in sync: who is primary and who is backup 7
Challenges Network and server failures Network partitions – Within each network partition, near-perfect communication between servers – Between network partitions, no communication between servers 8
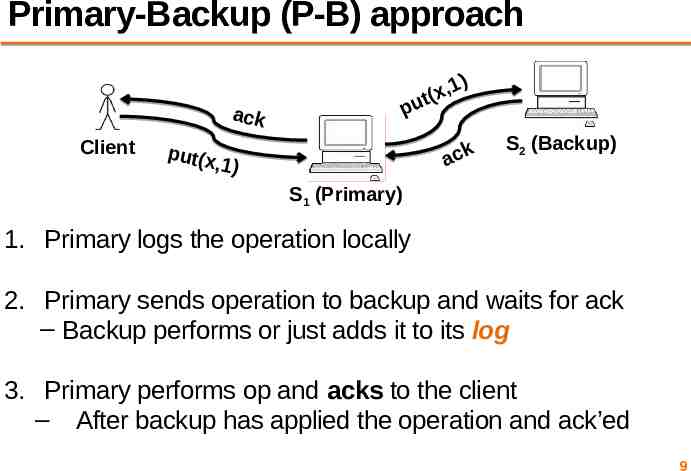
Primary-Backup (P-B) approach ,1 x ( t pu ack Client put(x ) ack ,1) S2 (Backup) S1 (Primary) 1. Primary logs the operation locally 2. Primary sends operation to backup and waits for ack – Backup performs or just adds it to its log 3. Primary performs op and acks to the client – After backup has applied the operation and ack’ed 9
View server A view server decides who is primary, who is backup – Clients and servers depend on view server Don’t decide on their own (might not agree) Challenge in designing the view service: – Only want one primary at a time – Careful protocol design needed For now, assume view server never fails 10
Monitoring server liveness Each replica periodically pings the view server – View server declares replica dead if it missed N pings in a row – Considers the replica alive after a single ping Can a replica be alive but declared “dead” by view server? – Yes, in the case of network failure or partition 11
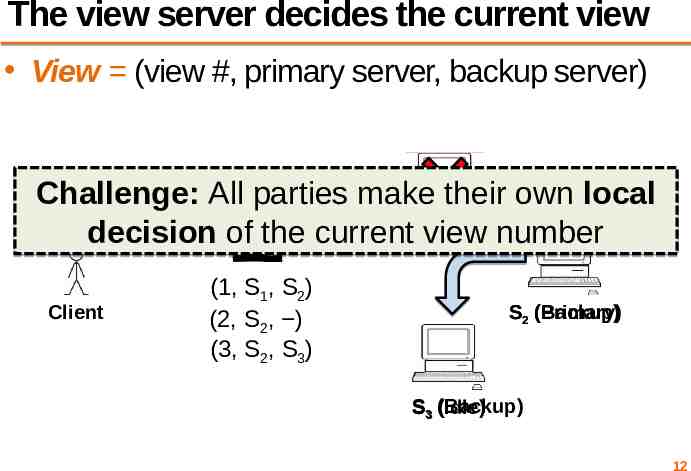
The view server decides the current view View (view #, primary server, backup server) Challenge: All parties make their own local S (Primary) decision of the current view number 1 Client (1, S1, S2) (2, S2, ) (3, S2, S3) (Backup) S2 (Primary) S3 (Backup) (Idle) 12
Agreeing on the current view In general, any number of servers can ping view server Okay to have a view with a primary and no backup Want everyone to agree on the view number – Include the view # in RPCs between all parties 13
Transitioning between views How to ensure new primary has up-to-date state? – Only promote a previous backup i.e., don’t make a previously-idle server primary – Set liveness detection timeout state transfer time How does view server know whether backup is up to date? – View server sends view-change message to all – Primary must ack new view once backup is up-to-date – View server stays with current view until ack Even if primary has or appears to have failed 14
Split Brain S1 (1, S1, S2) View Server S2 (1, S1, S2) (2, S2, ) (2, S2, ) Client 15
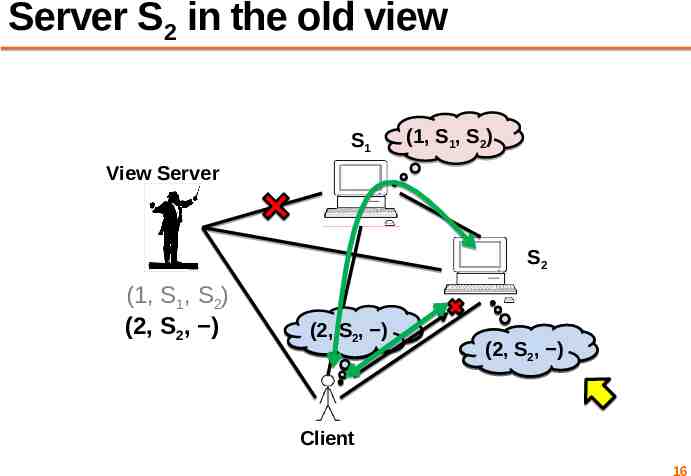
Server S2 in the old view S1 (1, S1, S2) View Server S2 (1, S1, S2) (2, S2, ) (2, SS12,, S )2) (1, (1, (2, SS12,, S )2) Client 16
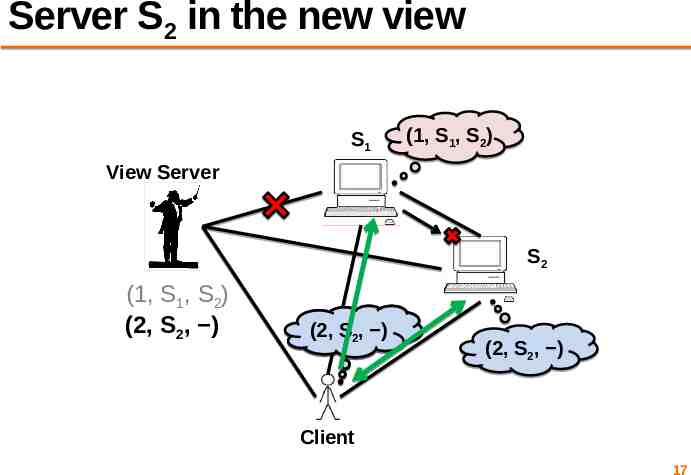
Server S2 in the new view S1 (1, S1, S2) View Server S2 (1, S1, S2) (2, S2, ) (1, (2, SS12,, S )2) (2, S2, ) Client 17
State transfer via operation log How does a new backup get the current state? – If S2 is backup in view i but was not in view i 1 – S2 asks primary to transfer the state One alternative: transfer the entire operation log Simple, but inefficient (operation log is long) 18
State transfer via snapshot Every op must be either before or after state transfer – If op before transfer, transfer must reflect op – If op after transfer, primary forwards the op to the backup after the state transfer finishes If each client has only one RPC outstanding at a time, state map result of the last RPC from each client – (Had to save this anyway for “at most once” RPC) 19
Summary of rules 1. View i’s primary must have been primary/backup in view i 1 2. A non-backup must reject forwarded requests – Backup accepts forwarded requests only if they are in its idea of the current view 3. A non-primary must reject direct client requests 4. Every operation must be before or after state transfer 20
Primary-Backup: Summary First step in our goal of making stateful replicas fault-tolerant Allows replicas to provide continuous service despite persistent net and machine failures Finds repeated application in practical systems (next) 21
Plan 1. Introduction to Primary-Backup replication 2. Case study: VMWare’s fault-tolerant virtual machine Scales et al., SIGOPS Operating Systems Review 44(4), Dec. 2010 (PDF) Upcoming – Two-phase commit and Distributed Consensus protocols 22
VMware vSphere Fault Tolerance (VM-FT) Goals: 1. Replication of the whole virtual machine 2. Completely transparent to applications and clients 3. High availability for any existing software 23
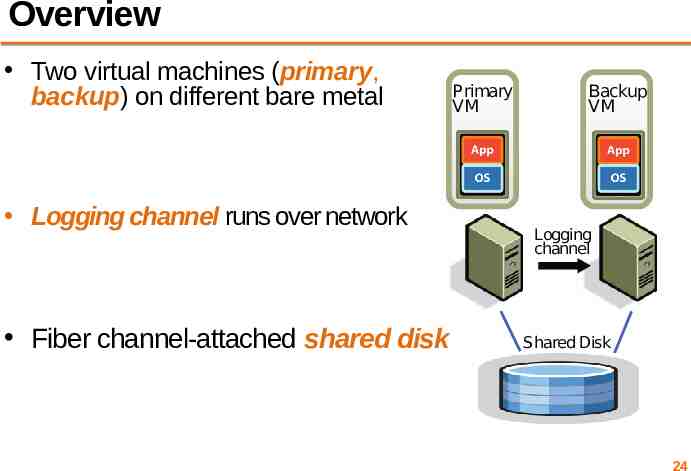
Overview Two virtual machines (primary, backup) on different bare metal Primary VM Backup VM Primary VM Backup VM Logging channel Logging channel runs over network Logging channel Shared Disk Fiber channel-attached shared disk Shared Disk 24
Virtual Machine I/O VM inputs – Incoming network packets – Disk reads – Keyboard and mouse events – Clock timer interrupt events VM outputs – Outgoing network packets – Disk writes 25
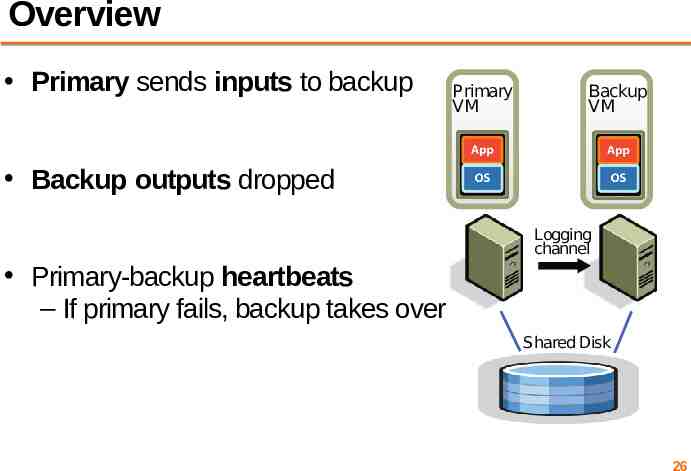
Overview Primary sends inputs to backup Backup outputs dropped Primary VM Backup VM Primary VM Backup VM Logging channel Logging channel Primary-backup heartbeats – If primary fails, backup takes over Shared Disk Shared Disk 26
VM-FT: Challenges 1. Making the backup an exact replica of primary 2. Making the system behave like a single server 3. Avoiding two primaries (Split Brain) 27
Log-based VM replication Step 1: Hypervisor at the primary logs the causes of non-determinism: 1. Log results of input events – Including current program counter value for each 2. Log results of non-deterministic instructions – e.g. log result of timestamp counter read (RDTSC) 28
Log-based VM replication Step 2: Primary hypervisor sends log entries to backup hypervisor over the logging channel Backup hypervisor replays the log entries – Stops backup VM at next input event or nondeterministic instruction Delivers same input as primary Delivers same non-deterministic instruction result as primary 29
VM-FT Challenges 1. Making the backup an exact replica of primary 2. Making the system behave like a single server – FT Protocol 3. Avoiding two primaries (Split Brain) 30
Primary to backup failover When backup takes over, non-determinism will make it execute differently than primary would have done – This is okay! Output requirement: When backup VM takes over, its execution is consistent with outputs the primary VM has already sent 31
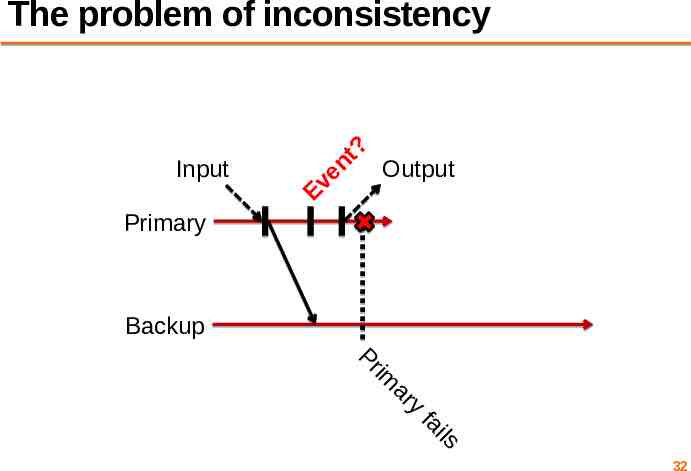
Input Ev en t? The problem of inconsistency Output Primary Backup Pr im ar y fa ils 32
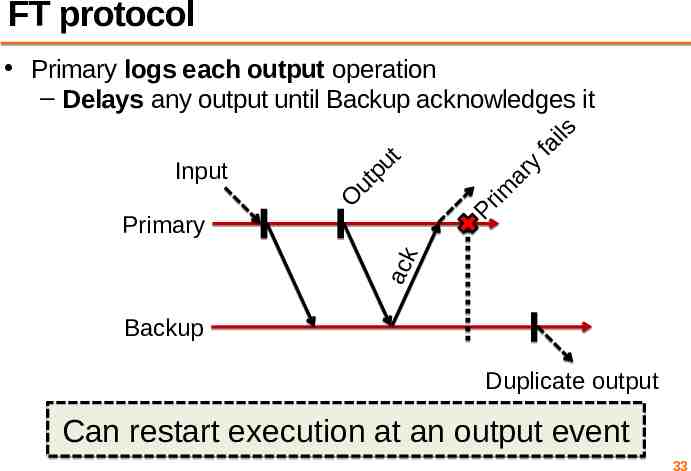
FT protocol fa ils ar y im Pr O Input ut pu t Primary logs each output operation – Delays any output until Backup acknowledges it ack Primary Backup Duplicate output Can restart execution at an output event 33
VM-FT: Challenges 1. Making the backup an exact replica of primary 2. Making the system behave like a single server 3. Avoiding two primaries (Split Brain) – Logging channel may break 34
Detecting and responding to failures Primary and backup each run UDP heartbeats, monitor logging traffic from their peer Before “going live” (backup) or finding new backup (primary), execute an atomic test-andset on a variable in shared storage If the replica finds variable already set, it aborts 35
VM-FT: Conclusion Challenging application of primary-backup replication Design for correctness and consistency of replicated VM outputs despite failures Performance results show generally high performance, low logging bandwidth overhead 36
11:59 PM tonight: Assignment 1 Deadline Friday Precept: Go concurrency & RPC Cristian’s algorithm Monday topic: Two-Phase Commit 37