ECGR 6185 Advanced Embedded Systems Accelerometers Ritesh R.
24 Slides1.01 MB
ECGR 6185 Advanced Embedded Systems Accelerometers Ritesh R. Savla [email protected] Advanced Embedded Systems. Dr. James M. Conrad 1
Summary Definition of Acceleration Acceleration fundamentals Need for Acceleration measurement. Types of Accelerometers. Capacitive Acceleration Sensor (CAS). Piezoelectric Acceleration sensor. Piezo-resistive Acceleration sensor. Hall Effect. Magneto resistive sensor. Applications of Accelerometers Advanced Embedded Systems. Dr. James M. Conrad 2
Acceleration Fundamentals What is Acceleration? Definition: the time rate of 2 v x change of velocity a 2 A.K.A.: the time rate of change t t of the time rate of change of distance What are the units? Acceleration is measured in (ft/s)/s or (m/s)/s What is a “g”? A “g” is a unit of acceleration equal to Earth’s gravity at sea level 1 g 32.2 ft/s2 or 9.81 m/s2 Advanced Embedded Systems. Dr. James M. Conrad 3
Acceleration concepts What is the time rate of change of velocity? When plotted on a graph, velocity is the slope of distance versus time Acceleration is the slope of velocity versus time Advanced Embedded Systems. Dr. James M. Conrad 4
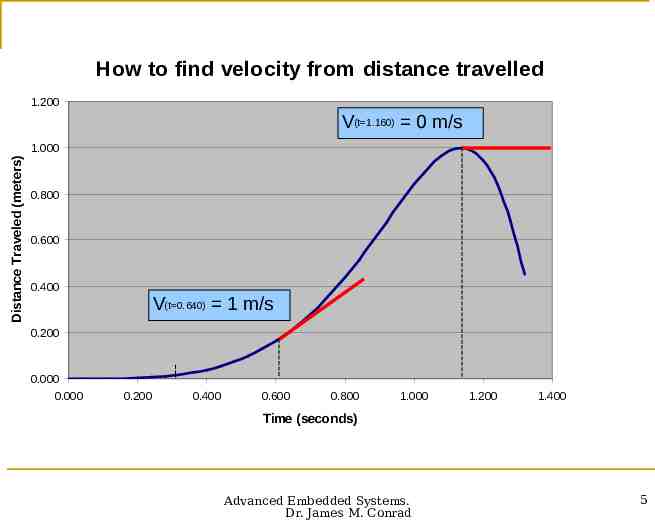
How to find velocity from distance travelled 1.200 V(t 1.160) 0 m/s Distance Traveled (meters) 1.000 0.800 0.600 0.400 V(t 0.640) 1 m/s 0.200 0.000 0.000 0.200 0.400 0.600 0.800 1.000 1.200 1.400 Time (seconds) Advanced Embedded Systems. Dr. James M. Conrad 5
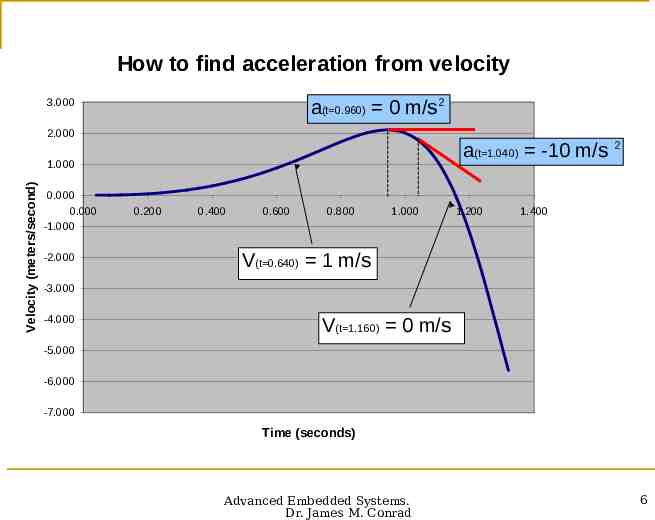
How to find acceleration from velocity 3.000 a(t 0.960) 0 m/s2 2.000 a(t 1.040) -10 m/s Velocity (meters/second) 1.000 0.000 0.000 -1.000 -2.000 0.200 0.400 0.600 0.800 1.000 1.200 2 1.400 V(t 0.640) 1 m/s -3.000 -4.000 V(t 1.160) 0 m/s -5.000 -6.000 -7.000 Time (seconds) Advanced Embedded Systems. Dr. James M. Conrad 6
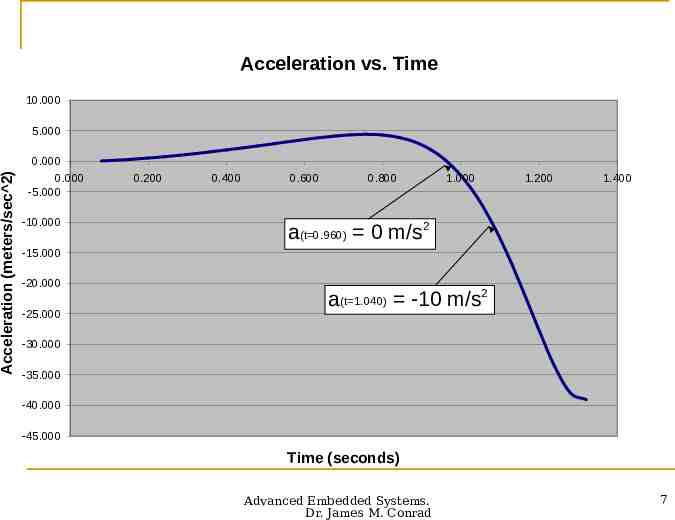
Acceleration vs. Time 10.000 Acceleration (meters/sec 2) 5.000 0.000 0.000 -5.000 -10.000 0.200 0.400 0.600 0.800 1.000 1.200 1.400 a(t 0.960) 0 m/s 2 -15.000 -20.000 -25.000 a(t 1.040) -10 m/s2 -30.000 -35.000 -40.000 -45.000 Time (seconds) Advanced Embedded Systems. Dr. James M. Conrad 7
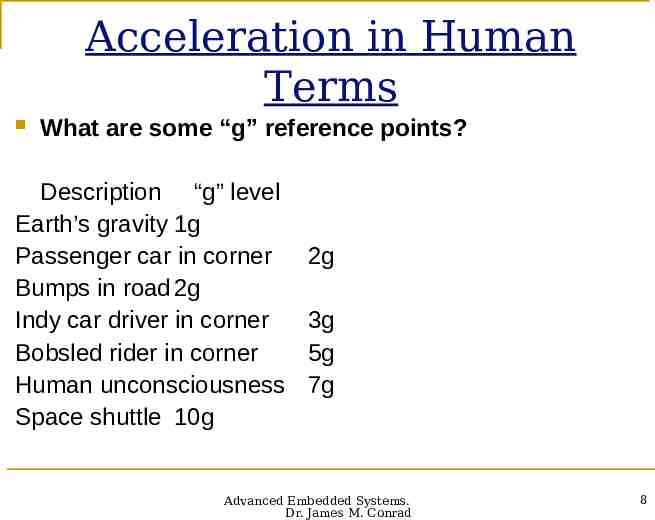
Acceleration in Human Terms What are some “g” reference points? Description “g” level Earth’s gravity 1g Passenger car in corner Bumps in road 2g Indy car driver in corner Bobsled rider in corner Human unconsciousness Space shuttle 10g 2g 3g 5g 7g Advanced Embedded Systems. Dr. James M. Conrad 8
Need for Acceleration measurement. Why measure acceleration? Acceleration is a physical characteristic of a system. The measurement of acceleration is used as an input into some types of control systems. The control systems use the measured acceleration to correct for changing dynamic conditions Advanced Embedded Systems. Dr. James M. Conrad 9
Common types of Accelerometers Sensor Category Key Technologies Capacitive -Metal beam or micromachined feature produces capacitance; change in capacitance related to acceleration Piezoelectric -Piezoelectric crystal mounted to mass – voltage output converted to acceleration Piezoresistive -Beam or micromachined feature whose resistance changes with acceleration Hall Effect -Motion converted to electrical signal by sensing of changing magnetic fields Magnetoresistive -Material resistivity changes in presence of magnetic field Heat Transfer -Location of heated mass tracked during acceleration by sensing temperature Advanced Embedded Systems. Dr. James M. Conrad 10
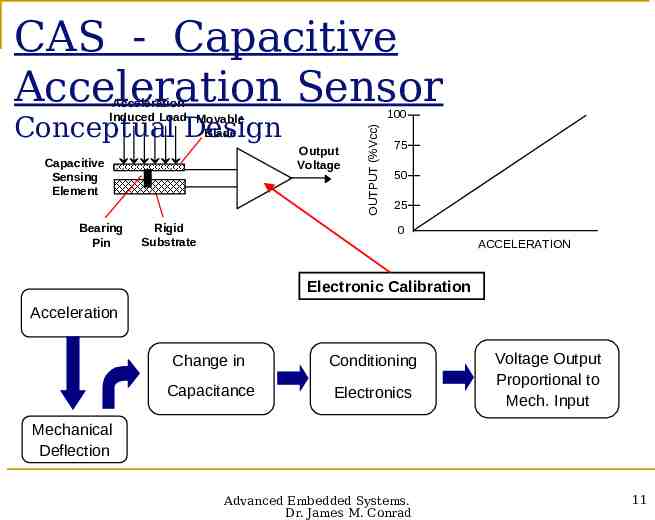
CAS - Capacitive Acceleration Sensor Acceleration Induced Load Movable Blade Capacitive Sensing Element Bearing Pin Rigid Substrate Output Voltage OUTPUT (%Vcc) Conceptual Design 100 75 50 25 0 ACCELERATION Electronic Calibration Acceleration Change in Conditioning Capacitance Electronics Voltage Output Proportional to Mech. Input Mechanical Deflection Advanced Embedded Systems. Dr. James M. Conrad 11
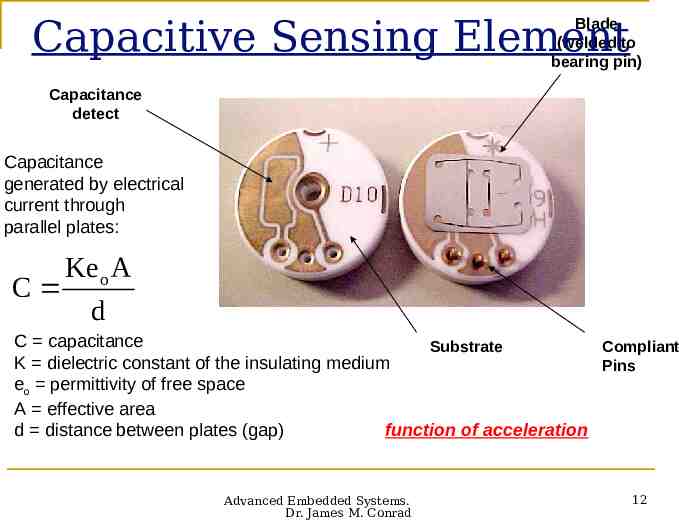
Capacitive Sensing Element Blade (welded to bearing pin) Capacitance detect Capacitance generated by electrical current through parallel plates: Ke o A C d C capacitance Substrate Compliant K dielectric constant of the insulating medium Pins eo permittivity of free space A effective area d distance between plates (gap) function of acceleration Advanced Embedded Systems. Dr. James M. Conrad 12
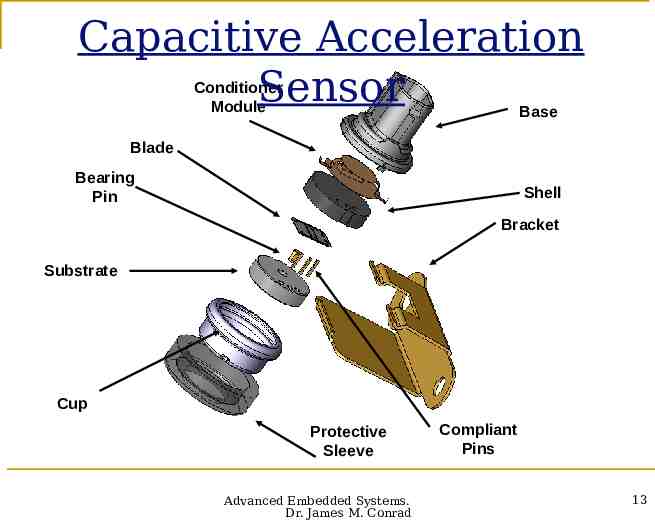
Capacitive Acceleration Sensor Conditioner Module Base Blade Bearing Pin Shell Bracket Substrate Cup Protective Sleeve Advanced Embedded Systems. Dr. James M. Conrad Compliant Pins 13
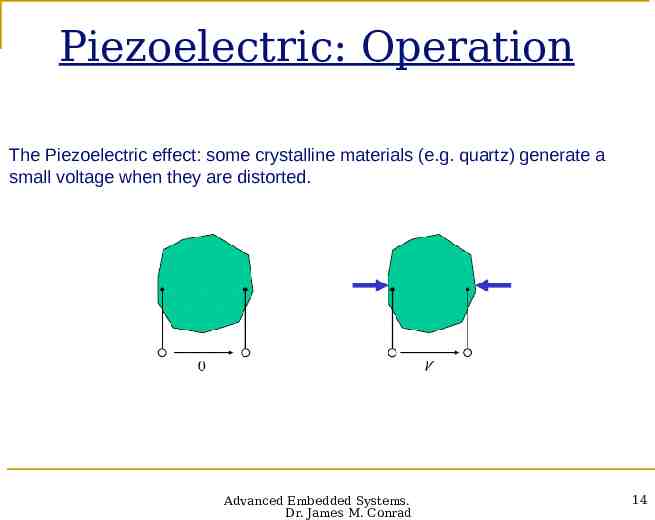
Piezoelectric: Operation The Piezoelectric effect: some crystalline materials (e.g. quartz) generate a small voltage when they are distorted. Advanced Embedded Systems. Dr. James M. Conrad 14
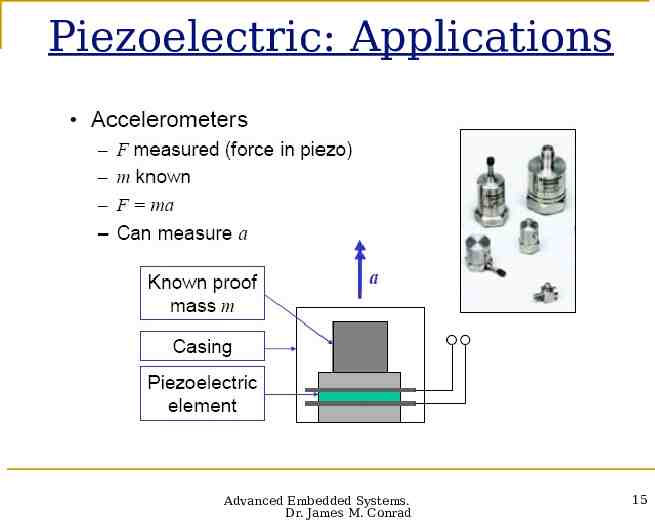
Piezoelectric: Applications Advanced Embedded Systems. Dr. James M. Conrad 15
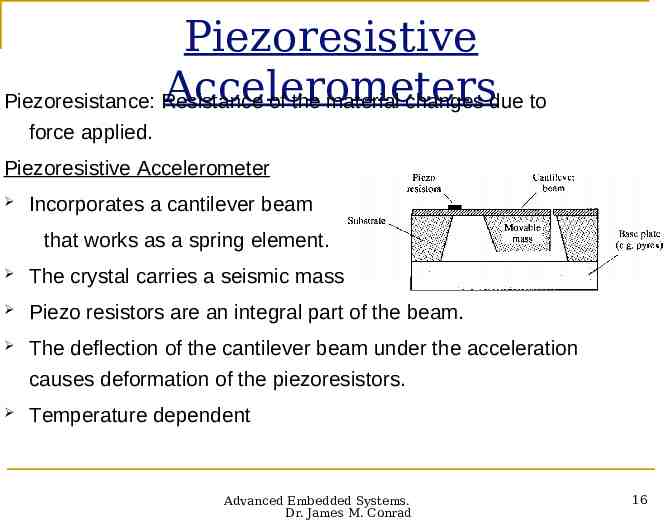
Piezoresistive Accelerometers Piezoresistance: Resistance of the material changes due to force applied. Piezoresistive Accelerometer Incorporates a cantilever beam that works as a spring element. The crystal carries a seismic mass Piezo resistors are an integral part of the beam. The deflection of the cantilever beam under the acceleration causes deformation of the piezoresistors. Temperature dependent Advanced Embedded Systems. Dr. James M. Conrad 16
Piezoresistive Accelerometers Use one or more resistive legs Measure DC coupled steady state conditions Externally powered Sensitivity of bridge varies with the input excitation voltage. Requires a highly stable and quiet excitation supply Differential amplifier is required between the two output leads Or both leads are floating, allows one output line to be tied to ground Amplifier cancels any equal noise picked up at the output Advanced Embedded Systems. Dr. James M. Conrad 17
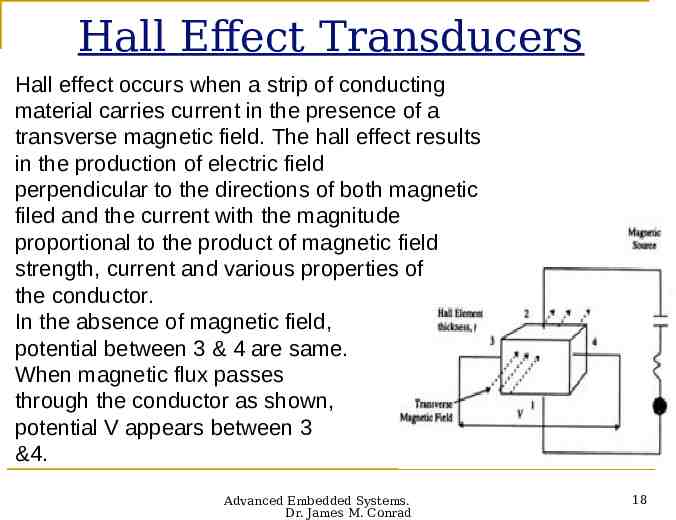
Hall Effect Transducers Hall effect occurs when a strip of conducting material carries current in the presence of a transverse magnetic field. The hall effect results in the production of electric field perpendicular to the directions of both magnetic filed and the current with the magnitude proportional to the product of magnetic field strength, current and various properties of the conductor. In the absence of magnetic field, potential between 3 & 4 are same. When magnetic flux passes through the conductor as shown, potential V appears between 3 &4. Advanced Embedded Systems. Dr. James M. Conrad 18
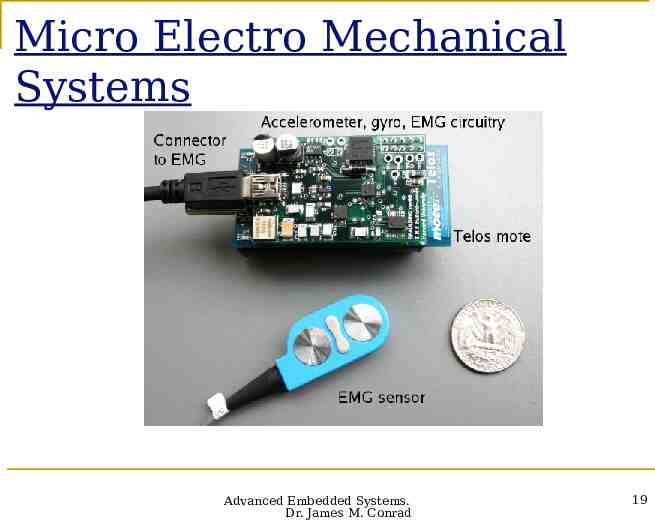
Micro Electro Mechanical Systems Advanced Embedded Systems. Dr. James M. Conrad 19
Typical Accelerometer Applications Tilt / Roll Vibration / “Rough-road” detection Vehicle skid detection Often used with systems that deploy “smart” braking to regain control of vehicle Impact detection Can be used to isolate vibration of mechanical system from outside sources To determine the severity of impact, or to log when an impact has occurred Input / feedback for active suspension control systems Keeps vehicle level Advanced Embedded Systems. Dr. James M. Conrad 20
References www.nuhorizons.com/mems/video.html web.mit.edu/3.52/Accelerometer.pdf www.ece.gatech.edu/research/integrated-mems www.stanford.edu/class/me220/lectures/lect04/lect 4.html www.ti.com www.xbow.com http://www.me.utexas.edu/ lotario/me244L/leks/ MotionMeasurement Acceleration.pdf Advanced Embedded Systems. Dr. James M. Conrad 21
Accelerometer Application Video Advanced Embedded Systems. Dr. James M. Conrad 22
Thank You Advanced Embedded Systems. Dr. James M. Conrad 23
?Questions? Advanced Embedded Systems. Dr. James M. Conrad 24