Physics 430: Lecture 23 Inertia Tensor and Principal Axes Dale E.
17 Slides382.50 KB
Physics 430: Lecture 23 Inertia Tensor and Principal Axes Dale E. Gary NJIT Physics Department
10.3 The Inertia Tensor For the case of a body rotating about a fixed axis, we are always free to arbitrarily call the axis the z axis, so that what we have discussed up to now (e.g. Ixz, Iyz, Izz) is sufficent. However, objects may not be constrained to rotate about a fixed axis, e.g. a tumbling object in free-fall. We can still take the instantaneous rotation axis as the z axis, but the axis itself can be changing with time. In addition, there are certain spin axis directions for which the angular momentum L and the rotation axis are in the same direction. These are called principal axes. Finally, as invariably happens, any symmetries of the object make these principal axes obvious, and the calculations are a lot easier when symmetries can be taken advantage of. What we will find is that one can calculate a single inertia tensor through a point that takes account of the shape of the object independent of the axis of rotation, and once that is established, the angular momentum about any axis through that point can be determined. We will also find that there are certain coordinate axes, the principal axes, for which the inertia tensor becomes especially simple. November 24, 2009
Angular Momentum for an Arbitrary Angular Velocity ω (as x , y , z ). We will write an arbitrary angular velocity vector The angular momentum is then L m r v m r ω r . r (ω r) For any position r (x, y, z), the terms can be explicitly written in the rather ugly form r ω r [( y 2 z 2 ) x xy y xz z , yx x ( z 2 x 2 ) y yz z , zx x zy y ( x 2 y 2 ) z ]. A double cross-product like this can be written down with the aid of A (rule B C() B( A C) C( A B) the BAC-CAB ). Try it. Then the general expression for the angular momentum has components Lx I xx x I xy y I xz z I xx m ( y 2 z 2 ) Ly I yx x I yy y I yz z . I x y m x y . Lz I zx x I zy y I zz z where etc. November 24, 2009
Simpler Forms We can write this equation for L in simpler forms. Instead of writing x, y, z, we can use subscripts 1, 2, 3 to get 3 Li I ij j . or just Li I ij j in Einstein summation notation. j 1 Or, we can write it in matrix form L Iω, I xx I xy I xz Lx x , , and L L . where I I I I ω yx yy yz y y I zx I zy I zz Lz z In this form, I is known as the inertia tensor. To distinguish this from the identity tensor you may be familiar with, the text uses 1 0 0 1 0 1 0 . 0 0 1 Note that the term tensor refers to a higher-order vector. A vector is written as a column, as in L and above, while a tensor is written as a matrix. November 24, 2009
Properties of the Inertia Tensor You can see from the elements of the moment of inertia tensor I xx m ( y 2 z 2 ) I x y m x y . etc. that it has the property that Iij Iji. The elements Iii are called the diagonal elements, so we can say that the inertia tensor is unchanged by swapping off-diagonal elements mirrored about the diagonal. Such a swap (replacing Iij with Iji and vice versa) is an operation I Tmatrix, . called taking the transpose of Ithe so we can say A matrix that is its own transpose is said to be symmetric, and this symmetric property plays a key role in the mathematical theory of the moment of inertia tensor. November 24, 2009
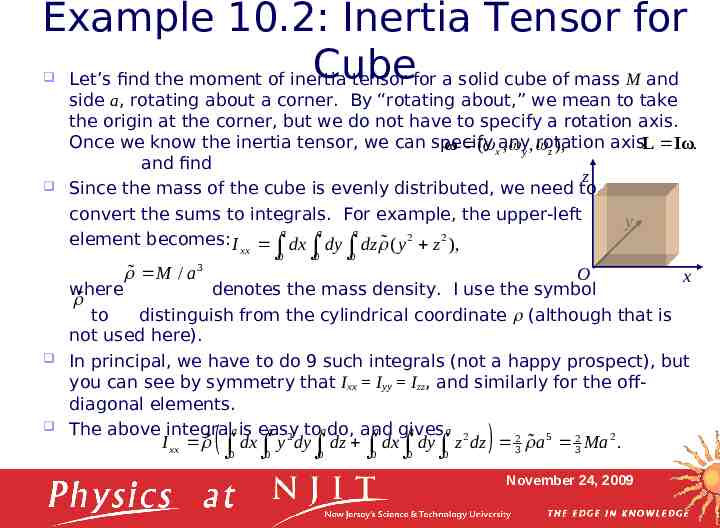
Example 10.2: Inertia Tensor for Cube Let’s find the moment of inertia tensor for a solid cube of mass M and side a, rotating about a corner. By “rotating about,” we mean to take the origin at the corner, but we do not have to specify a rotation axis. Once we know the inertia tensor, we can specify rotation axisL Iω. ω ( xany , y , z ), and find z Since the mass of the cube is evenly distributed, we need to convert the sums to integrals. For example, the upper-left y a a a element becomes: I dx dy dz ( y 2 z 2 ), xx M / a 0 3 0 0 O x where denotes the mass density. I use the symbol to distinguish from the cylindrical coordinate (although that is not used here). In principal, we have to do 9 such integrals (not a happy prospect), but you can see by symmetry that Ixx Iyy Izz, and similarly for the offdiagonal elements. a a a a The above integrala is easy toa do, and gives I xx dx y 2 dy dz dx dy z 2 dz 23 a 5 23 Ma 2 . 0 0 0 0 0 0 November 24, 2009
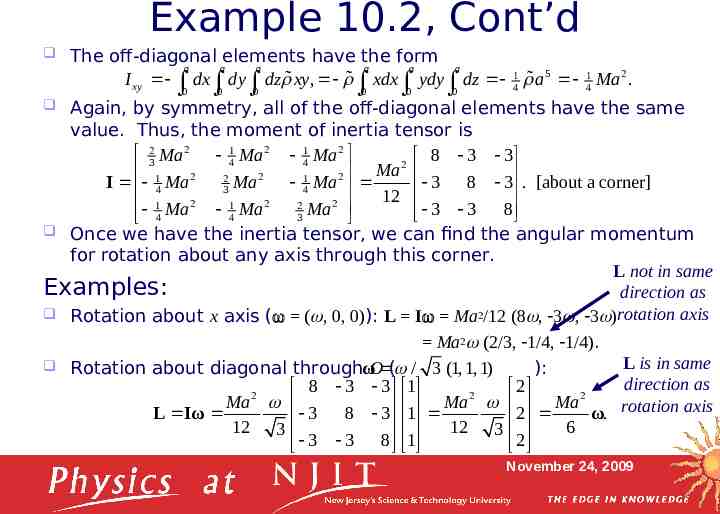
Example 10.2, Cont’d The off-diagonal elements have the form a a a a a a I xy dx dy dz xy, xdx ydy dz 0 0 0 0 0 0 1 4 a 5 14 Ma 2 . Again, by symmetry, all of the off-diagonal elements have the same value. Thus, the moment of inertia tensor is 23 Ma 2 14 Ma 2 14 Ma 2 8 3 3 2 Ma . [about a corner] 2 2 2 1 I 14 Ma 2 Ma Ma 3 8 3 3 4 12 2 2 2 1 1 2 4 Ma 4 Ma 3 3 8 3 Ma Once we have the inertia tensor, we can find the angular momentum for rotation about any axis through this corner. L not in same Examples: direction as Rotation about x axis ( ( , 0, 0)): L I Ma2/12 (8 , 3 , 3 )rotation axis Ma2 (2/3, 1/4, 1/4). L is in same Rotation about diagonal throughωO ( / 3 (1, 1, 1) ): direction as 8 3 3 1 2 2 2 2 Ma 1 Ma 2 Ma ω. rotation axis L Iω 3 8 3 12 3 12 3 6 3 3 8 1 2 November 24, 2009
Example 10.2, Cont’d While we are on the cube problem, let’s illustrate an important point. If we shift the origin to the center of the cube, the diagonal element integrals are just as easy, simply change the limits, e.g. I xx a /2 a /2 a /2 2 a /2 a /2 a /2 a /2 a /2 a /2 a /2 a /2 dx y dy dz dx dy z 2 dz 2 23 a 2 (a / 2)3 16 Ma 2 . a /2 but the off-diagonals are all odd functions, so when we change the limits they all go to zero, e.g. a /2 a /2 a /2 a /2 a /2 a /2 a /2 a /2 a /2 a /2 a /2 a /2 I xy dx dy dz xy, xdx ydy dz 0. The inertia tensor is then diagonal, i.e. 1 0 0 2 Ma Ma 2 I 0 1 0 1. 6 6 0 0 1 Note that, no matter what direction is, L is always parallel to it: Ma 2 L Iω ω. 6 November 24, 2009
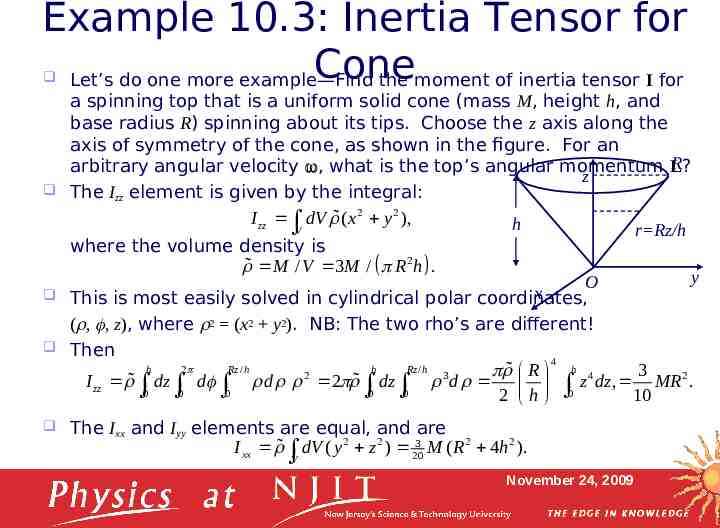
Example 10.3: Inertia Tensor for Cone Let’s do one more example—Find the moment of inertia tensor I for a spinning top that is a uniform solid cone (mass M, height h, and base radius R) spinning about its tips. Choose the z axis along the axis of symmetry of the cone, as shown in the figure. For an R arbitrary angular velocity , what is the top’s angular momentum L? z The Izz element is given by the integral: I zz dV ( x 2 y 2 ), h V r Rz/h where the volume density is M / V 3M / R 2 h . y O x This is most easily solved in cylindrical polar coordinates, ( , , z), where 2 (x2 y2). NB: The two rho’s are different! Then 4 h 2 Rz / h h Rz / h R 3 h I zz dz d d 2 2 dz 3 d z 4 dz , MR 2 . 0 0 0 0 0 2 h 0 10 The Ixx and Iyy elements are equal, and are I xx dV ( y 2 z 2 ) 203 M ( R 2 4h 2 ). V November 24, 2009
Example 10.3: Cont’d All of the off-diagonal elements are zero. Note that symmetry about any two axes guarantees that all of the off-diagonal elements are zero. Then, the moment of inertia tensor is: R 2 4h 2 0 0 1 0 0 3 I M 0 R 2 4h 2 0 0 2 0 . 20 2 0 0 2 R 0 0 3 The last form is just for further discussion. A matrix with all zero offdiagonal elements is, as we said, called a diagonal matrix. We can then write L Iω ( , , ). 1 x 2 y 3 z What this means is that whenever points along one of the three coordinate axes, L and are parallel. This brings us (finally) to the concept of principal axes of inertia. November 24, 2009
10.4 Principal Axes of Inertia Whenever L and point in the same direction, this marks a principal axis for the body. For principal axes, we can express this parallelism as L . But since L , that means the constant of proportionality is the moment of inertia about that axis, so is called a principal moment. Recall that when 0 1I is 0diagonal I 0 2 0 , L Iω ( 1 x , 2 y , 3 z ). then 0 0 3 Thus, each of the i are principal moments, and are in fact THE principal moments for rotations about a particular origin. If a body has an axis of symmetry about any origin, then that axis is a principal axis. Furthermore, there are always two additional principal axes perpendicular to such a symmetry axis (even though there is no further symmetry about those additional axes). Although symmetry makes it easier to spot a principal axis, it is NOT required. Any body, symmetrical or not, has three principal axes about any origin, for which the inertia tensor I is diagonal. November 24, 2009
Principal Axes of Inertia-2 The appendix shows how to diagonalize any matrix, and since such a diagonalized matrix represents three principal axes, any choice of axes for which the matrix starts out non-diagonal can be transformed into a new set of axes (called eigenvectors) for which the matrix is diagonal. Before going on to discuss this further, we first make a point about determining the kinetic energy of a rotating body. Our old form of kinetic energy (valid only when L and are aligned, which we called the z axis) is most properly given T 12 now I zz 2 .as The general expression is (seeT problem 12 ω L. 10.33) L ( 1 1 , 2 2 , 3 3 ), Using a set of principal axes, we have kinetic energy becomes: T 12 ( 1 12 2 22 3 32 ). so the November 24, 2009
10.5 Finding the Principal Axis Eigenvalue Equations The recipe for finding the principal axes through some origin O is as follows: Find the inertia tensor by choosing some axes. If the inertia tensor is diagonal, we are done. We have already found the principal axes. If not, we need to diagonalize the tensor matrix. How do we do that? The clue is that the equation Iω ω, must be satisfied for some as yet unknown number . This is called an eigenvalue equation, and the number is called the eigenvalue. The vector is called an eigenvector, and will be one of our principal axes. In practice, we want to know three eigenvalues, and three eigenvectors, which will give us our three principal axes. As it turns out, we can find all three at once. The trick is to recognize that we can convert the number into a matrix by multiplying by the identity matrix 1. Since leads to cubic for , Iω 1ω, with three roots (I 1)ω 0, we must have whose only non-trivial solution is det(I 1) 0. November 24, 2009
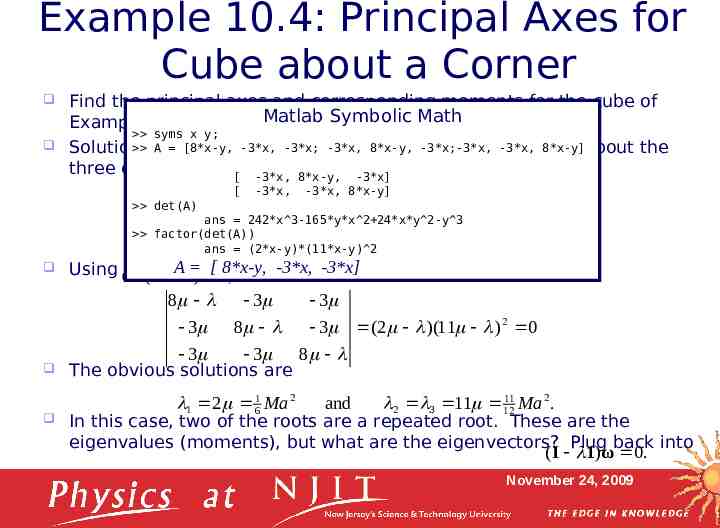
Example 10.4: Principal Axes for Cube about a Corner Find the principal axes and corresponding moments for the cube of Example 10.2, rotatingMatlab about Symbolic its corner.Math syms x y; We A [8*x-y, -3*x; -3*x, 8*x-y, -3*x, 8*x-y]about the Solution: found -3*x, in example 10.2 that-3*x;-3*x, the inertia tensor three edges of the [cube were: -3*x, 8*x-y, -3*x] [ -3*x, 3 8*x-y] 3 8-3*x, 8 3 3 2 det(A) Ma 3 . ans I 242*x 3-165*y*x 2 24*x*y 2-y 3 3 8 3 8 3 factor(det(A)) 12 3 3 3 3 ans (2*x-y)*(11*x-y) 2 8 8 8*x-y, -3*x, -3*x] Using det(I A we have 1 ) [ 0, 8 3 3 3 8 3 (2 )(11 ) 2 0 3 3 8 The obvious solutions are 1 2 16 Ma 2 11 and 2 3 11 12 Ma 2 . In this case, two of the roots are a repeated root. These are the eigenvalues (moments), but what are the eigenvectors? Plug back into (I 1)ω 0. November 24, 2009
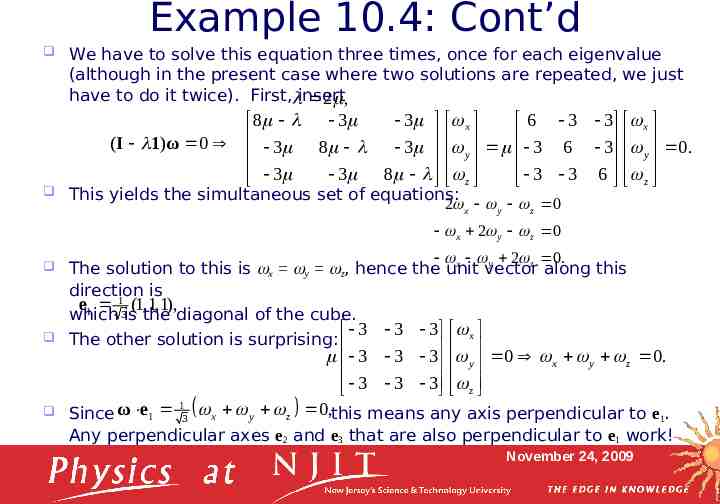
Example 10.4: Cont’d We have to solve this equation three times, once for each eigenvalue (although in the present case where two solutions are repeated, we just have to do it twice). First, insert 2 , (I 1)ω 0 3 x 8 3 6 3 3 x 3 8 3 3 6 3 0. y y 3 3 3 6 z 3 8 z This yields the simultaneous set of equations: 2 x y z 0 x 2 y z 0 x y 2 z 0. The solution to this is x y z, hence the unit vector along this direction is 1 e1 3 (1,1,1), which is the diagonal of the cube. 3 3 3 x The other solution is surprising: 3 3 3 y 0 x y z 0. 3 3 3 z 0,this means any axis perpendicular to e1. Since ω e1 3 x y z Any perpendicular axes e2 and e3 that are also perpendicular to e1 work! 1 November 24, 2009
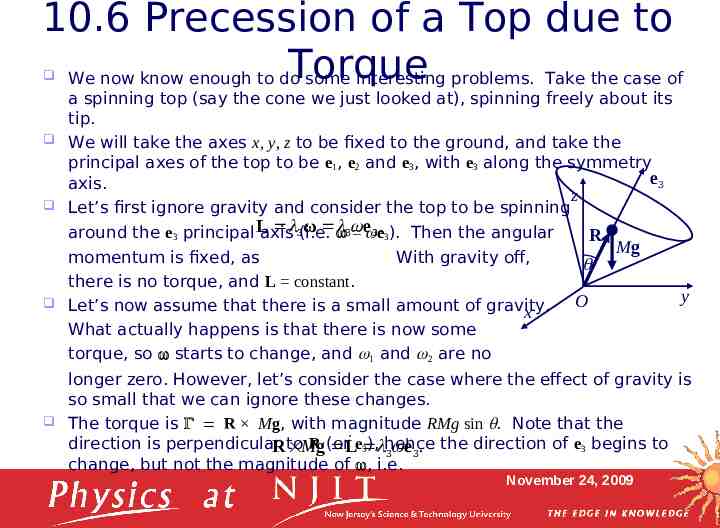
10.6 Precession of a Top due to Torque We now know enough to do some interesting problems. Take the case of a spinning top (say the cone we just looked at), spinning freely about its tip. We will take the axes x, y, z to be fixed to the ground, and take the principal axes of the top to be e1, e2 and e3, with e3 along the symmetry e3 axis. z Let’s first ignore gravity and consider the top to be spinning 3(i.e. ω around the e3 principal Laxis 3 e 3e. 3). Then the angular R Mg momentum is fixed, as With gravity off, there is no torque, and L constant. Let’s now assume that there is a small amount of gravity. x What actually happens is that there is now some torque, so starts to change, and and are no longer zero. However, let’s consider the case where the effect of gravity is so small that we can ignore these changes. The torque is R Mg, with magnitude RMg sin . Note that the direction is perpendicular the direction of e3 begins to 3), hence R to MRg (or L e 3 e 3 . change, but not the magnitude of , i.e. O November 24, 2009 y
Precession of a Top due to Torque2noting Rthat Solving for the changing e , and Re and g gzˆ , 3 e 3 where Ω MgR zˆ . 3 3 MgR zˆ e3 Ω e3 , 3 This is the angular velocity of precession of the top. When gravity becomes greater, so that we cannot ignore the changes in and , then we will find another wobble of the top, called nutation (see section 10.10). The Earth displays exactly these same motions, in this case due to non-central forces by the Sun and Moon. The precession of the equinoxes takes about 23,000 years, and over time makes the north pole of the Earth point to different “pole stars.” The current pole star, Polaris, will cease being the “north star” over time. November 24, 2009